
MODULO PRINCIPIOS DE MOTORES ELECTRICOS EN
REFRIGERACION Y CLIMATIZACION
ING ANTONIO FAVIO OSPINO MARTNIEZ
CANAL
YOUTUBE: ANTONIO OSPINO
Tabla de contenido
del capitulo
1.
PRINCIPIOS DE MOTORES ELECTRICOS APLICADOS A REFRIGERACION
1.1.5.
INTENSIDAD DE CAMPO MAGNETICO ( H )
1.1.6.
DENSIDAD DE FLUJO MAGNETICO O INDUCCION MAGNETICA ( B )
1.1.7.
PERMEABILDAD MAGNETICA ( m )
1.1.8.
PERMEABILIDAD RELATIVA ( µR )
1.1.10.
FUERZA MAGNETOMOTRIZ ( F )
1.1.11.
RESISTENCIA MAGNETICA O RELUCTANCIA ( R )
1.2.
CONCEPTOS FUNDAMENTALES EMPLEADOS EN MOTORES ELECTRICOS
1.2.1.
LEY DE FARADAY – TENSION INDUCIDA POR UN CAMPO MAGNETICO VARIABLE EN EL TIEMPO
1.2.2.
FUERZA PRODUCIDA SOBRE UN CONDUCTOR
1.2.4.
CAMPO MAGNETICO ALREDEDOR DE UN CONDUCTOR
1.2.5
CAMPOS MAGNETICOS EN BOBINAS
1.3. CONCEPTOS BASICOS DE ONDAS ALTERNAS, DIRECTOS,
MOTORES AC Y DC
1.6.1.1.
CAMPO MAGNETICO GIRATORIO EN MOTORES MONOFASICOS ASINCRONICOS
1.6.1.2.
CAMPO MAGNETICO GIRATORIO EN MOTORES TRIFASICOS ASINCRONICOS
1.6.1.3.
TIPOS DE MOTORES ASINCRONICOS
1.6.1.4.
TIPOS DE ARRANQUE PARA MOTORES TRIFASICOS ASINCRONICOS
1.6.2.1.
ARRANQUE DE MOTORES SINCRONICOS EMPLEANDO DEVANADOS DE AMORTIGUACION
1.7.
RELACION DE LA FRECUENCIA ELECTRICA CON LA VELOCIDAD DEL ROTOR
1.
PRINCIPIOS DE MOTORES ELECTRICOS APLICADOS A REFRIGERACION
1.1.
EL MAGNETISMO
El fenómeno del movimiento para motores eléctricos
tiene que ver con el fenómeno magnético. Los elementos principales que producen
magnetismo son los imanes estos pueden ser de dos tipos o clases:
·
Naturales:
Producidos por la naturaleza, de un material llamado Magnetita.
·
Artificiales:
Producidos por el hombre, estos pueden ser de efectos temporal o permanente.
Para entender un poco este mecanismo, tengamos en
cuenta los siguientes conceptos:
1.1.1.
RETENTIVIDAD MAGNETICA
Es la propiedad que tienen los materiales para retener
magnetismo. En este aspecto hay que recalcar que cuando a un imán permanente se
le quita su fuerza de magnetización, su magnetismo no se elimina por completo,
queda con un poco de magnetismo llamado Magnetismo Residual.
1.1.2. HISTERESIS
Es la oposición que presenta un material magnetizado a
su estado inicial o desmagnetizado.
1.1.3. ZONAS DE UN
IMAN
Todo imán tiene tres zonas definidas:
·
ZONA
O POLO NORTE
·
ZONA
NEUTRA: Es la zona intermedia entre el polo norte y el sur, no presenta
propiedades magnéticas considerables de atracción o repulsión.
·
ZONA
O POLO SUR

La fuerza magnética de un imán es mayor en sus
extremos y se va reduciendo a medida que nos acercamos a la zona neutral. Hay
que agregar también que los polos de imán, hasta el día de hoy, son
inseparables y por mucho que los divida físicamente, se crearan las tres zonas
descritas anteriormente. La fuerza magnética de un imán es invisible y solo se
pueden apreciar sus efectos.
El campo magnético del imán está formado por las
llamadas Líneas de Fuerza, o Líneas de energía Magnética. Estas líneas
invisibles penetran los cuerpos. Estas líneas van paralelas entre sí a través
del campo magnético y forman un circuito cerrado cuyas líneas entran por el
polo sur y salen por el norte. Su intensidad es mayor en los extremos y menor
en la zona neutral.

Con respecto a la atracción de los polos diferentes y
repulsión de los polos iguales, tiene que ver mucho con la orientación de los
campos magnéticos

Los
polos iguales se repelen, debido a que los sentidos de las líneas de campo son
contrarios

Los
polos diferentes se atraen, debido a que los sentidos de las líneas de campo
son iguales y se alinean. Ahora los imanes juntos se convierten en uno solo.

Para identificar los polos de un imán, lo podemos
hacer con una brújula. Al
ser la aguja de la brújula otro imán, También sus líneas de campo se alinean
con las de otros campos magnéticos, por tanto, la punta norte de la aguja se
alinea indicando directamente el sentido de los mismo y de esta forma poder
identificar un polo en especial. Veamos la situación para identificar un polo
norte.


Veamos el comportamiento de la
aguja de la brújula con un polo sur:


Ver video:
|
|
|
1.1.4. METODOS DE
IMANTACIÓN
·
Por
contacto o frotamiento: Se toma un pedazo de hierro que se desea imantar y se
frota uno de sus extremos con uno de los polos del imán; luego, se frota el
otro extremo del pedazo de hierro con el polo opuesto del imán.
·
Inducción
magnética: Con este método se acerca un imán permanente de alto poder a los
pedazos de hierro y estos al estar dentro de su campo magnético adquieren
cierto grado de magnetismo.
·
Corriente
eléctrica: cuando una corriente fluye por un conductor, dicha corriente genera
un campo magnético.
1.1.5. INTENSIDAD
DE CAMPO MAGNETICO ( H )
Se define como el esfuerzo que hace un material para
crear un campo magnético o la intensidad de un campo producido por una
corriente I. Su unidad en el SI es el amperio vuelta/metro.
H = N * I /
LC
Donde:
LC: Longitud media del núcleo que contiene
el campo o de la bobina en metros
N: Número de vueltas de la bobina.
I: Corriente en amperios de la bobina.
Otra definición es el esfuerzo que hace la corriente
para crear un campo magnético.
1.1.6. DENSIDAD DE
FLUJO MAGNETICO O INDUCCION MAGNETICA ( B )
B = µ * H = Φ / A
Donde:
µ: Permeabilidad magnética del material.
H: Intensidad de campo magnético en Amperios – Vuelta
/ metro
Φ: Flujo magnético en Webers
Las unidades de B son Webers/mts2 ( Tesla
). También se define como la cantidad de líneas de flujo magnético que
atraviesan perpendicularmente un área.

1.1.7.
PERMEABILDAD MAGNETICA ( m )
Es la facilidad o capacidad que tiene una sustancia
para permitir el paso de las líneas de fuerza de un campo magnético generado. De
acuerdo con la permeabilidad, los materiales tienen un valor de permeabilidad
dado a partir de 1, que es el valor de referencia de la permeabilidad del aire.
Estos materiales se dividen en:
·
Ferromagnéticos:
Tienen valores altos de permeabilidad.
·
Paramagnéticos:
Presentan un grado intermedio de permeabilidad.
·
Diamagnéticos:
No son atraídos por los imanes.
Sus unidades son Henrios/metro.
1.1.8.
PERMEABILIDAD RELATIVA ( µR )
Es la relación entre la permeabilidad de un material y
la permeabilidad del espacio libre ( µO )
µR = µ / µO
Donde:
µO = 4π * 10-7
Henrio / metro
Este concepto sirve para comparar la facilidad con que
se pueden magnetizar los materiales.
1.1.9. FLUJO
MAGNETICO ( f )
Es la relación de la densidad de flujo magnético que
atraviesa una superficie o área perpendicular a la dirección de este. Su unidad
es el Webber ( Wb )
f = B * A = H * m * A = µ N I A / LC
Donde:
A: Área transversal del núcleo.
1.1.10. FUERZA
MAGNETOMOTRIZ ( F )
Se mide en amperios vuelta y su fórmula es:
F = Φ
* R = N * I
Donde:
F: Fuerza magnetomotriz
Φ: Flujo magnético
R: Reluctancia.
N: Número de vueltas de la bobina.
I: Corriente de la bobina.
1.1.11.
RESISTENCIA MAGNETICA O RELUCTANCIA ( R )
Es la oposición o resistencia que presentan los
materiales al paso de las líneas de fuerza de un campo magnético.
R = LC / µ A
Al igual que las resistencias eléctricas, tienen las
mismas fórmulas para reluctancias en serie y en paralelo.
1.2. CONCEPTOS
FUNDAMENTALES EMPLEADOS EN MOTORES ELECTRICOS
1.2.1. LEY DE
FARADAY – TENSION INDUCIDA POR UN CAMPO MAGNETICO VARIABLE EN EL TIEMPO
Esta ley establece que, si un flujo pasa a través de
una espira de una bobina formada por un elemento conductor, en ella se induce
un voltaje que es directamente proporcional a la rata de variación del flujo
con respecto al tiempo. En otras palabras y para entenderlo de mejor forma,
esta FEM generada se produce siempre y cuando los conductores corten las líneas
de campo magnético, esta FEM también depende de la velocidad con que los
conductores atraviesen a las líneas de campo magnético y también de la intensidad
del campo magnético.


En resumen, se puede decir que la FEM inducida, se
produce en una bobina, cuando en su movimiento, corta perpendicularmente a las
líneas de campo magnético
V inducido =
- N
N: Número de espiras
V inducido : Tensión inducida
f: Flujo magnético en Wb

La dirección o polaridad de la tensión inducida viene
por la ley de Lenz que establece que la dirección del voltaje inducido en la
bobina es tal que, si los terminales de la bobina se cortocircuitan, se
producirá una corriente que a su vez originaría un flujo de sentido opuesto a
la variación original del flujo.
Otra forma de expresar la ley de Lenz es que el
sentido de la corriente inducida en la bobina es tal que tiende a oponerse a la
causa que lo produjo.
1.2.2. FUERZA
PRODUCIDA SOBRE UN CONDUCTOR
Un conductor de longitud L, que transporta una
corriente eléctrica I, pasa por un campo magnético B, dicho conductor
experimentará una fuerza que viene expresada por:
F = I ( L x B )
Donde:
I : Magnitud de la corriente en amperios
L: Longitud del conductor en la dirección de la
corriente i en mts.
B: Vector de densidad de flujo magnético en Wb/mts2
F: Fuerza en N
La dirección de la fuerza está dada por la regla de la
mano derecha. La magnitud de la fuerza o su escalar este dado por la expresión:
F = I L Sen q, donde q es el ángulo comprendido
ente la dirección del conductor y el vector de densidad del flujo magnético.


1.2.3. TENSION INDUCIDA EN UN CONDUCTOR EN
MOVIMIENTO DENTRO DE UN CAMPO MAGNÉTICO O FEM DE MOVIMIENTO
Si un conductor se mueve dentro de un campo magnético,
en él se inducirá un voltaje. Dicho voltaje esta dado por la expresión:
V inducido = ( Vel x B ) . L
Donde:
Vel: Velocidad del conductor.
B: Densidad del flujo magnético
L: Longitud del conductor


La tensión en el conductor deberá tener la polaridad
positiva en la misma dirección del vector ( Vel x B ) y su valor escalar es:
V inducido = Vel * B * L * Sen q * Cos f, donde q es el ángulo entre la
dirección de la velocidad del conductor y el vector de densidad del flujo
magnético y f
es el ángulo comprendido entre el vector ( Vel
x B ) y el eje del conductor.
1.2.4. CAMPO
MAGNETICO ALREDEDOR DE UN CONDUCTOR
El danés Hans Oersted descubrió en el siglo XIX que
todo conductor que transporta corriente eléctrica se forma un campo magnético
alrededor del mismo. La dirección del campo magnético es como cilindros
envolventes del conductor o cable y la dirección de las líneas de fuerza
dependían de la dirección en que la corriente circulaba.


La intensidad de dicho campo también dependía de la
intensidad con que circulaba la corriente y son directamente proporcionales. Si
se deseaba incrementar la intensidad del campo magnético al cable se le dan más
vueltas o se aumentan el número de espiras. Por ejemplo, si la corriente está
en la dirección mostrada la dirección de las líneas de fuerza del campo
magnético está en sentido antihorario y depende de la regla de la mano derecha.


Estos sentidos los podemos demostrar usando cuatro
brújulas y pasado corriente por el cable, las agujas indicaran los sentidos de
los campos magnéticos dependiendo del sentido de la corriente por el cable:


Ver videos:
|
RELACION ENTRE CORRIENTES Y CAMPOS MAGNETICOS |
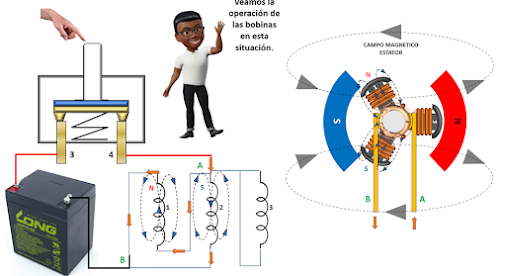
1.2.5 CAMPOS
MAGNETICOS EN BOBINAS
Cuando por una bobina
circula una corriente, esta genera a su vez un campo magnético formándose un
electroimán, la dirección del campo magnético depende del sentido del flujo de
corriente:

Veamos los siguientes
ejemplos:



Ver video:
|
|
1.2.6
AUTOINDUCCION
Cuando por una bobina circula una corriente variable,
esta genera a su vez un campo magnético también variable que corta a los
conductores de la propia bobina. Este campo autogenerado producirá una f.e.m en
la misma bobina cuto sentido se opone a la fuerza que lo produjo.
En otras palabras, las bobinas generan f.e.m, cuyo
propósito es mantener el estado de corriente de la bobina. Le f.e.m de
autoinducción depende de la rapidez con que el flujo magnético varia en la
misma:
E autoiduccion = ΔΦ / Δt = L Δ I /
Δt
Donde:
L : Coeficiente autoinducción en Henrios.
L = N Φ / I
1.3. CONCEPTOS
BASICOS DE ONDAS ALTERNAS, DIRECTOS, MOTORES AC Y DC
Antes de entrar en detalles veamos algunos conceptos básicos:

Con respecto a la ubicación de la onda en un cuadrante
superior o inferior podemos decir que Son acuerdos para indicar la condición de la variable
en el tiempo, por ejemplo, si se tiene un campo magnético dirigido hacia
arriba, su grafica ira en la parte superior del cuadrante y abajo cuando su
campo magnético este dirigido hacia abajo.

En el caso anterior, la bobina estuvo apagada y
después se enciende para tener un campo magnético dirigido hacia arriba
constante, por eso trazamos su grafica en el cuadrante superior.
Ahora si apaga la bobina, se tiene la siguiente
situación:

En la figura anterior, no corriente no hay campo
magnético. Ahora si invertimos la corriente de la bobina se crea un campo
magnético, de igual intensidad, pero en sentido contrario para lo cual se tiene
la siguiente situación:

Y si volvemos a apagar la bobina:

Una onda directa es aquella que no cambia la polaridad de la fuente o sentido de corriente en el tiempo.

Con respecto al instrumento hay que tener en cuenta la
polaridad para la ubicación de las puntas de prueba ya que determina la
posición de la gráfica:

Veamos otros tipos de ondas de tipo DC:

Si invertimos la posición del diodo:

En el caso de una rectificación completa:

En el caso de un PWM positivo para control de motores DC con escobillas:

Una onda alterna es aquella que cambia su polaridad y sentido
de corriente en el tiempo; posee valores mínimos, máximos, rms, periodos y
frecuencias. En este tipo de ondas, no importa la posición de las puntas, se
obtiene la misma grafica.


Veamos algunos tipos de ondas alternas:


Ver video:
|
DIFERENCIAS
ENTRE UNA ONDA ALTERNA Y UNA ONDA DIRECTA
|
|
Con respecto a las diferencias entre motores AC y DC:
Los motores
AC (corriente alterna) y DC (corriente directa) se diferencian entre si
principalmente en la forma en que se suministra la energía eléctrica a sus bobinas
para producir movimiento mecánico.
Este tipo
de alimentación eléctrica determina el principio de giro de los mismo, así como
el tipo de construcción tanto mecánica ( rotor de inducción, magnéticos, etc )
como eléctrica ( número de bobinas, distribución de bobinas, etc )

Veamos algunos ejemplos:


En un motor AC la tensión
y la corriente eléctrica se suministran a las bobinas de manera alterna, lo que
significa que tanto la tensión como la corriente en las bobinas cambian de
polaridad y sentido constantemente.
Poseen
rotores no imantados como los de jaula de ardilla, pero pueden tenerlos con
ayuda de bobinas ( rotor devanado ).

En el
estator pueden tener dos bobinas ( monofásicos ) y tres o más bobinas (
trifásicos )


En un motor
DC la tensión y corriente eléctrica se suministra a las bobinas de forma
directa, lo que significa que tanto la tensión como la corriente NO cambian de
polaridad y sentido mientras opera el motor. En estos motores el rotor posee su
propio campo magnético, producido a partir de bobinas ( rotor devanado ) o
magnetos permanentes.

Ahora veamos un ejemplo donde veremos la importancia
de comprender como opera nuestro motor y la grafica que genera en el
instrumento para no caer en falsos diagnósticos.
Para este motor DC, analicemos la curva de corriente
en tres estados:

Aquí el rotor gira en sentido antihorario, por tanto,
su grafica de corriente la ubicamos en la parte superior, tal como se observa
en la figura anterior.
Si se desea hacer un cambio de giro se debe
desenergizar el motor, tal como se observa y veamos la gráfica de esta
condición:

Para girar en sentido contrario, se debe cambiar la
polaridad de la fuente, para que la corriente circula en sentido contrario, por
eso el comportamiento de la corriente va en la parte inferior del plano del
instrumento tal como se observa:

En conclusión:



Ahora, si se tiene este caso:

Ver video:
|
DIFERENCIAS BASICAS ENTRE MOTORES
ELECTRICOS AC Y MOTORES ELECTRICOS DC |
|
1.4. MOTORES DC

Ahora
veamos las partes básicas que lo componen:

En la
figura anterior, se tiene al rotor o eje móvil, está compuesto por una
ARMADURA, que son placas unidas que soportan a las bobinas, se posee un
colector de delgas o CONMUTADOR que sirve para conectar las bobinas y recibir
la tensión de los electrodos o escobillas.

Con
relación a la forma como se organizan las bobinas, van conectadas en serie con
el mismo sentido de enrollamiento, de esta forma se garantiza el sentido de
giro del rotor.

Con
respecto a la operación, veamos esta primera situación:

Para la
posición mostrada del rotor, la bobina 3 en sus extremos tiene la misma
polaridad B, no hay diferencia de potencial en sus terminales y no circula
corriente, por tanto, no formará campo magnético.
En cambio,
las bobinas 1 y 2 si poseen una diferencia de potencial en sus extremos, pero,
la corriente en ellas circula en sentidos diferentes, formándose en ellas
campos magnéticos con diferentes orientaciones:

Al formarse
los campos magnéticos, establecen las acciones de atracción y repulsión con los
polos de los imanes del estator, presentado el par inicial o giro en el rotor:


Analicemos
ahora esta nueva posición del rotor:

Para la
posición mostrada del rotor, la bobina 1 en sus extremos tiene la misma
polaridad A, no hay diferencia de potencial en sus terminales y no circula
corriente, por tanto, no formará campo magnético.
En cambio,
las bobinas 3 y 2 si poseen una diferencia de potencial en sus extremos, pero,
la corriente en ellas circula en sentidos diferentes, formándose en ellas
campos magnéticos con diferentes orientaciones:

Al formarse
los campos magnéticos, establecen las acciones de atracción y repulsión con los
polos de los imanes del estator, presentado el par o torque para mantener el
giro en el rotor:


Analicemos
ahora esta nueva posición del rotor:

Para la
posición mostrada del rotor, la bobina 2 en sus extremos tiene la misma
polaridad B, no hay diferencia de potencial en sus terminales y no circula
corriente, por tanto, no formará campo magnético.
En cambio,
las bobinas 3 y 1 si poseen una diferencia de potencial en sus extremos, pero,
la corriente en ellas circula en sentidos diferentes, formándose en ellas
campos magnéticos con diferentes orientaciones:

Al formarse
los campos magnéticos, establecen las acciones de atracción y repulsión con los
polos de los imanes del estator, presentado el par o torque para seguir
manteniendo el giro en el rotor:


Finalmente
analicemos esta última condición:

Para la
posición mostrada del rotor, la bobina 3 en sus extremos tiene la misma
polaridad A, no hay diferencia de potencial en sus terminales y no circula
corriente, por tanto, no formará campo magnético.
En cambio,
las bobinas 2 y 1 si poseen una diferencia de potencial en sus extremos, pero,
la corriente en ellas circula en sentidos diferentes, formándose en ellas
campos magnéticos con diferentes orientaciones:
Al formarse
los campos magnéticos, establecen las acciones de atracción y repulsión con los
polos de los imanes del estator, presentado el par o torque para seguir con el
giro en el rotor:


En resumen:
·
La
corriente que entra al rotor por las escobillas o electrodos NUNCA cambia el
sentido de movimiento.
·
En
este motor de tres ( 3 ) bobinas, solo dos de ellas operan; una generando un
campo magnético en un sentido que es atraído por uno de los polos del imán del
estator y la otra bobina operativa genera un campo magnético que es repelido
por el otro polo del imán del estator, generado el torque necesario para hacer
el giro del rotor.
·
Este
motor cambia su sentido de giro con solo cambiar el sentido de la corriente que
lo alimenta y para ello se cambia de polaridad la fuente.
·
Para mejorar el torque o el movimiento, existen
rotores con 5 o más bobinas, dependiendo del diseño.
·
Este principio es la base del motor BLDC.

Ver video:
|
PRINCIPIO
DE OPERACION DE MOTOR DC CON IMANES PERMANENTES |
|
1.5. MOTORES BRUSHLESS
Debido a los problemas del colector en los motores DC,
que generan chispas y perdidas, se hace la evolución para eliminar el colector
y tener un motor sin colector o escobillas. Estos nuevos motores se caracterizan
porque pueden ser de estator interno o estator externo:


Con relación a su control, se usan sistemas de control
y potencia electrónicos. En lo concierne a sus rotores son magnéticos de 2, 4, 6,
8 y más polos. Los polos en estos rotores van intercalados tal como se muestra:


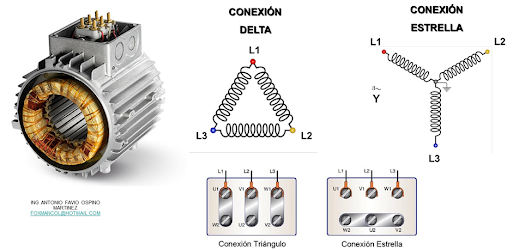
Con respecto a la conexión de sus bobinas, heredan de
los motores AC sus conexiones tipo Delta o triangulo y conexión tipo Y o Estrella,
siendo esta última la más común. Posee tres conexiones de entra igual que los motores
AC trifásicos ( U, V y W ). Para cada ramal se tiene dos, tres, cuatro o mas
bobinas en serie, dependiendo del tipo de motor, tal como se muestra:


Las bobinas de cada ramal se conectan en serie y poden
el mismo sentido de enrollamiento, por tanto, los campos magnéticos que se forman
en ellos son igual intensidad y con el mismo sentido:



Con relación a los campos magnéticos que se forman en
el estator, siempre operan dos ramales y el otro queda flotante o sin energización ( bobina flotante ).
Las tensiones que llegan a los puntos U, V y W varían de acuerdo con el tipo de
motor y control de este.
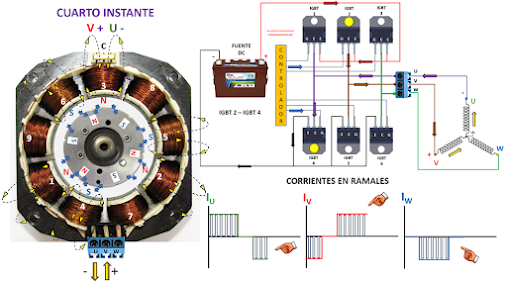
En el caso de este motor de 9 bobinas, y rotor de 6 polos magnéticos, el controlador va energizando dos bobinas de modo que se generan campos magnéticos consecutivos con diferentes sentidos para garantizar que el rotor persiga dicho campo magnético tal como se muestra:

En este instante operan los ramales U y V.
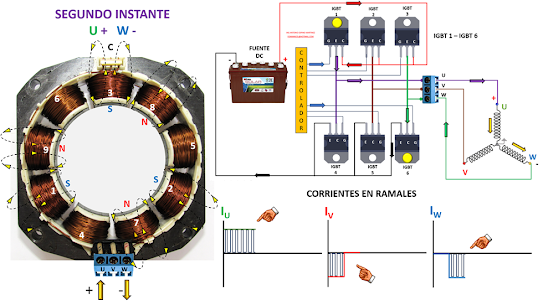
En este instante operan los ramales U y W.

En este instante operan los ramales V y W.

En este instante operan los ramales V y U.

En este instante operan los ramales W y U.

En este instante operan los ramales W y V.
A partir de este momento, se repite la secuencia para hacer un giro completo.
OBS: La secuencia depende del tipo de motor.
De aquí podemos sacar las siguientes conclusiones:

|
VIDEO I ESTRUCTURA ROTOR - ESTATOR Y CAMPO MAGNETICO EN COMPRESOR BRUSHLESS DOMESTICO REFRIGERACION |
https://youtu.be/TjedmxI8F2c |
Ahora, para la rotación del rotor se hace por atracción
y repulsión entre los campos magnéticos del mismo y el estator. El controlador
asegura en campo magnético rotativo en el estator, de forma que el rotor
persoga a este ismo sin alinearse.

El rotor gira, pero antes que los campos magnéticos del
rotor, se alinean con los del estator, el controlador cambia la energización de
las bobinas de modo que se impida que el rotor se detenga y continue con su
giro:

Ahora viene el segundo instante:


En el tercer instante:



En el quinto instante:


En el sexto instante:


A partir de este momento, se repite nuevamente la
secuencia:
U + V –
U + W –
V + W –
V + U –
W + U –
W + U -
OBS: La secuencia depende del tipo de motor.
De aquí podemos sacar las siguientes conclusiones:

Ver video:
|
VIDEO II PRINCIPIO DE ROTACION DEL ROTOR EN COMPRESOR BRUSHLESS DOMESTICO DE REFRIGERACION |
|
Con respecto al inicio o arranque del motor:

Ver video:
|
VIDEO III ROTACION, INICIO Y TIPO
DE ONDA QUE ALIMENTA A COMPRESOR BRUSHLESS DOMESTICO REFRIGERACION |
|
1.6. MOTORES AC
El principio de las máquinas de AC, a diferencia de le
de DC es su sistema de movimiento. Mientras en los DC el giro es producido por
la fuerza inducida en una espira del rotor o por efectos de atracción o
repulsión de campos magnéticos, los motores de Ac generan en el estator campos
magnéticos dinámicos ( pueden ser alternativos o giratorios ) y el rotor
persigue ese campo magnético tratando de alinearse con el mismo o perseguirlo.
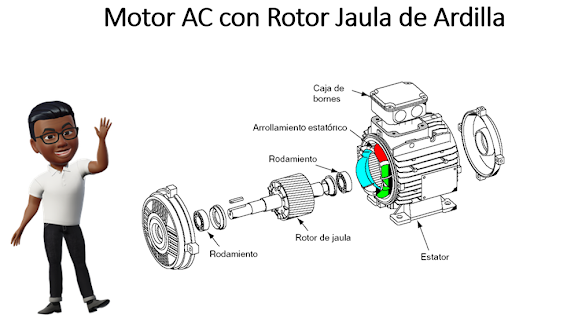
1.6.1. MOTORES
ASINCRONICOS
Este tipo de motores nunca puede girar a la misma
velocidad que el campo magnético del estator, ya que, si lo hiciera, no habría
par mecánico y se detendría. Por este
motivo, estos motores reciben el nombre de Asincrónicos, llamándose
deslizamiento a la diferencia de velocidad entre el campo magnético y la
velocidad del rotor. Dicho deslizamiento varía según la carga que maneje el motor,
pero suele variar de un 2% a un 8%. Este tipo de motores también se les llama
con rotor jaula de ardilla, muy usado en compresores de refrigeración. El
término par motor se refriere al torque del mismo y se expresa en Kilogramos
por metro no Libras por pie. Para entender un poco este proceso empecemos en
primera instancia por comprender lo que sucede con un campo magnético giratorio
en sistemas monofásicos y trifásicos.

1.6.1.1.
CAMPO MAGNETICO GIRATORIO EN MOTORES MONOFASICOS ASINCRONICOS
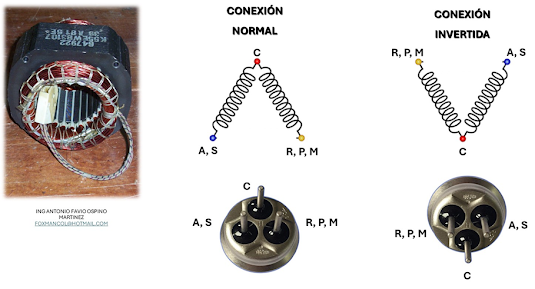
Estos motores poseen dos devanados en el estator
ubicado a 90º geométrico uno del otro. Estas bobina tienen un punto de unión
que se le denomina punto común o C. y sus otras terminales son Arranque ( A o S
) y punto de marcha ( R, M, P ). Los filamentos de la bobina de marcha son más
gruesos que la bobina de arranque, por esta razón, la bobina de arranque tendrá
más vueltas y por tanto más resistencia eléctrica.

Debido a su construcción se requieren kit de arranque
para este fin, entre los más comunes está el condensador cuya función es el de
desfasar la corriente que pasa por una bobina para crear un campo magnético
giratorio. Vamos un ejemplo en el cual se ha puesto un condensador en la bobina
de arranque para desfasar su corriente con respecto a la de marcha.
Como la corriente de la bobina de arranque se
adelanta, en el tiempo 0, se observa que está en mayor valor la corriente que
pasa por la misma, por lo tanto, su campo magnético es alto, mientras que por
la bobina de marcha no pasa corriente, por tanto, su campo magnético es cero o
no se ha formado.

Transcurrido un tiempo nos encontramos en el tiempo 1.
Donde ahora la corriente que pasa por la bobina de arranque es cero y no se
forma campo magnético, pero si se forma en la bobina de marcha que experimenta
ahora un paso de corriente.

En el tiempo 2, se hace cero la corriente que pasa por
la bobina de marcha y su campo magnético desparece, y la bobina de arranque
vuelve a experimentar corriente, pero circulando en sentido contrario, por esta
razón hora su campo magnético cambia de sentido. Tal como se observa en la
figura:

En el tiempo 3, la corriente que pasa por la bobina de
arranque vuelve a ser cero, lo mismo que su campo magnético, pero ahora la
corriente está pasando por la bobina de marcha pero en sentido contrario por
eso su campo magnético cambia de sentido tal como lo muestra la figura:

En el tiempo 4, nuevamente volvemos al inicio, la
corriente que pasa por la de arranque es máxima, en sentido contrario por eso
su campo magnético cambia de sentido y la corriente que pasa por la bobina de
marcha es cero al igual que su campo magnético.

De lo anterior se deduce que, si el elemento que
adelanta la corriente se coloca en serie con la bobina de marcha, entonces el
sentido de giro se invierte.
El campo magnético rotativo en el estator al cortar las
barras de la jaula de ardilla en el rotor, crea un campo magnético que se le
denomina “INDUCIDO”, y este campo tratará de alinearse con el campo del estator,
generador el torque o par necesario para iniciar el giro en el rotor.




En los motores de baja potencia, después del arranque
no se necesita que siga operando la bobina de arranque y esta se desconecta por
medios mecánicos o eléctricos.


Para compresores monofásicos de media a alta potencia
es necesario mantener el campo magnético giratorio del estator quedando activas
ambas bobinas

Ver videos:
|
PRINCIPIO
DE OPERACION MOTOR ELECTRICO DE INDUCCION MONOFASICO |
|
1.6.1.2.
CAMPO MAGNETICO GIRATORIO EN MOTORES TRIFASICOS ASINCRONICOS
Estos motores poseen tres devanados en el estator
ubicado a 120º geométrico uno del otro. Los filamentos de las bobinas de marcha
son por lo general del mismo grosor. Debido a su construcción no requieren kit
de arranque para este fin. Vamos un ejemplo en el cual se arranca un motor
trifásico, con su alimentación de red ya desfasadas 120º.


En el tiempo 1, las bobinas A y B tienen una
intensidad mediana de corriente y forman campos magnéticos de mediana
intensidad; pero la alta intensidad circula ahora por la bobina C la cual forma
su campo magnético de alta intensidad. Al tener tres elementos, se obtiene un
resultante en la dirección del campo magnético formado por la bobina C; o sea,
los campos magnéticos de mediana intensidad ayudan a fortalecer el de alta
intensidad.

En el tiempo 2, se intensifica el campo magnético de
la bobina A, se debilita el campo magnético de la bobina C y el campo magnético
de la bobina B cambia de sentido a media intensidad. Ahora los campos medianos
de las bobinas B y C ayudan a intensificar el campo magnético de la bobina A

En el tiempo 3, se intensifica el campo magnético de
la bobina B, se debilita el campo magnético de la bobina A y el campo magnético
de la bobina C cambia de sentido a media intensidad. Ahora los campos medianos
de las bobinas A y C ayudan a intensificar el de la bobina B.

En el tiempo 4, se intensifica el campo magnético de
la bobina C, se debilita el campo magnético de la bobina B y el campo magnético
de la bobina A cambia de sentido a media intensidad. Ahora los campos medianos
de las bobinas A y B ayudan a intensificar el de la bobina C.

En el tiempo 5, se intensifica el campo magnético de
la bobina A, se debilita el campo magnético de la bobina C y el campo magnético
de la bobina B cambia de sentido a media intensidad. Ahora los campos medianos
de las bobinas B y C ayudan a intensificar el de la bobina A.

En el tiempo 6, se intensifica el campo magnético de
la bobina B, se debilita el campo magnético de la bobina A y el campo magnético
de la bobina C cambia de sentido a media intensidad. Ahora los campos medianos
de las bobinas A y C ayudan a intensificar el de la bobina B

Con lo anterior se completa un giro del campo
magnético en el estator. Cabe anotar que si se desea que el campo magnético del
estator gire en sentido contario, basta con intercambiar solo dos líneas de
alimentación a las bobinas para que esto ocurra.
Como se analiza, se forman en el estator tres campos
magnéticos, dos de menor intensidad que refuerzan al de mayor intensidad
generando un campo magnético resultante más potente; este campo resultante
genera en el rotor un campo magnético inducido que tratará de alinearse y
perseguir al campo del estator generando el par suficiente para su giro

Ver video:
|
PRINCIPIO
DE OPERACION MOTOR ELECTRICO TRIFASICO DE INDUCCION |
|
1.6.1.3.
TIPOS DE MOTORES ASINCRONICOS
1.6.1.3.1.
MONOFASICOS
Estos motores se aplican para bajas y medias
potencias, pero a diferencia de los trifásicos, esos requieren kits de
arranque, son más voluminosos para la misma potencia, tienen factores de
potencias más bajos.
1.6.1.3.1.1. DE
BOBINADO AUXILIAR
Por lo general requiere de condensadores para poder
arrancar, estos condensadores están en serie con la bobina auxiliar o de
arranque. En algunos de ellos, se desconecta la bobina de arranque después que
el motor ha girado, en otros, esta se mantiene en operación.
La forma mas común de desconectar la bobina auxiliar
en con interruptores centrífugos. Estos motores por lo general poseen rotores
tipo jaula de ardilla.
El tipo de rotor jaula de ardilla esta construido
sobre un marco de barras metálicas cortocircuitadas en sus extremos.
|
|
|
1.6.1.3.1.2. DE
ESPIRA EN CORTO CIRCUITO O BOBINA SOMBRA
Son empleados en sistemas de baja potencia. Muy
empleados en ventiladores de evaporador y condensador de sistemas domésticos y
algunos comerciales de baja potencia.
|
|
|
Fig . Motores
asincronicos AC con bobina sombra.
1.6.1.3.1.3.
UNIVERSALES
Son motores que pueden conectarse tanto a sistemas DC
como a sistemas de alimentación AC. Cuando el motor es conectado a una fuente
DC, este incrementa su potencia a medida que se varía el voltaje de la fuente.
Estos motores son muy similares en su construcción a
los motores de tipo DC, aquí las bobinas del estator están conectadas en serie
con las bobinas del rotor. Los extremos de estas bobinas de rotor están
conectados a un colector de delgas, divididos en segmentos ( dos segmentos para
cada bobina de rotor ).
Este colector toma corriente AC por medio de unos
electrodos, carbones o escobillas, los cuales se asientan en sus respectivos
portaescobillas. Son muy usados en sistemas domésticos, como taladros,
batidoras, etc.
1.5.1.3.2.
TRIFASICOS
Estos motores no requieren kits de arranque, ya que
las tres líneas desfasadas crean un campo magnético giratorio en el estator.
1.6.1.3.2.1. DE
ROTOR BOBINADO
En estos equipos, el rotor posee bobinas que son
alimentadas para crear un campo magnético.
Fig 11.11. Rotor bobinado.
1.6.1.3.2.2. DE
ROTOR JAULA DE ARDILLA
Tiene el mismo principio de funcionamiento de los
devanados amortiguadores, Veamos la situación entre unos devanados verticales y
unos horizontales. Si el giro del campo magnético del estator es anti horario,
entonces las velocidades relativas de cada capa de barra es la siguiente:
|
|
Ahora veamos lo que sucede cuando se pone a funcionar
el campo magnético giratorio del estator. En el tiempo 0, el campo magnético
del estator esta en dirección vertical hacia arriba, como las velocidades
relativas de los devanados horizontales con respecto a la dirección del campo
del estator están alineados, en estos no se induce voltaje, por tanto no se
generan corrientes y por ende capos magnético. El torque generado es cero
entonces:
Par inducido por devanados horizontales = 0
Pero en los devanados verticales, como sus velocidades
no están alineadas con el campo magnético, entonces se generan voltajes, que
hacen circular corriente para producir un campo magnético en sentido anti
horario, este campo, con el del estator generan un par que viene dado por la
expresión:
Par inducido por devanados verticales = K * ( BDV x BE )
|
|
En el tiempo 1, el campo magnético del estator esta en
dirección horizontal hacia la izquierda, como las velocidades relativas de los
devanados verticales con respecto a la dirección del campo del estator están
alineados, en estos no se induce voltaje, por tanto no se generan corrientes y
por ende capos magnético. El torque generado es cero entonces:
Par inducido por devanados verticales = 0
Pero en los devanados horizontales, como sus
velocidades no están alineadas con el campo magnético, entonces se generan
voltajes, que hacen circular corriente para producir un campo magnético en
sentido anti horario, este campo, con el del estator generan un par que viene
dado por la expresión:
Par inducido por devanados horizontales = K * ( BDH x BE )
|
|
En el tiempo 2, el campo magnético del estator esta en
dirección vertical hacia abajo, como las velocidades relativas de los devanados
horizontales con respecto a la dirección del campo del estator están alineados,
en estos no se induce voltaje, por tanto no se generan corrientes y por ende
capos magnético. El torque generado es cero entonces:
Par inducido por devanados horizontales = 0
Pero en los devanados verticales, como sus velocidades
no están alineadas con el campo magnético, entonces se generan voltajes, que
hacen circular corriente para producir un campo magnético en sentido anti
horario, este campo, con el del estator generan un par que viene dado por la
expresión:
Par inducido por devanados verticales = K * ( BDV x BE )
|
|
En el tiempo 3, el campo magnético del estator esta en
dirección horizontal hacia la derecha, como las velocidades relativas de los
devanados verticales con respecto a la dirección del campo del estator están
alineados, en estos no se induce voltaje, por tanto no se generan corrientes y
por ende capos magnético. El torque generado es cero entonces:
Par inducido por devanados verticales = 0
Pero en los devanados horizontales, como sus
velocidades no están alineadas con el campo magnético, entonces se generan
voltajes, que hacen circular corriente para producir un campo magnético en
sentido anti horario, este campo, con el del estator generan un par que viene
dado por la expresión:
Par inducido por devanados horizontales = K * ( BDH x BE )
|
|
1.6.1.4.
TIPOS DE ARRANQUE PARA MOTORES TRIFASICOS ASINCRONICOS
1.6.1.4.1.
ARRANQUE ESTRELLA TRIANGULO
Este arranque consiste en arrancar el motor con el
sistema de estrella y después de arrancado, cambiar su sistema a triangulo con
el fin de disminuir las corrientes de arranque del motor.
1.6.1.4.2.
ARRANQUE CON AUTOTRANSFORMADOR
Este sistema es empleado en motores de grandes
potencias y consiste en colocar un autotransformador entre las líneas de
alimentación y el motor. En el momento del arranque se disminuye el voltaje que
le llega al motor y a medida que pasa el tiempo se va incrementado hasta su
valor normal.
1.5.1.4.3.
ARRANQUE CON RESISTENCIAS EN SERIE.
El sistema consiste en colocar reóstatos en serie con
las bobinas del estator del motor. En el momento del arranque se coloca en
reóstato en sus valores máximos y después se reduce su valor hasta que el motor
le llega el voltaje pleno de la red.
1.5.2.
MOTORES SINCRONICOS
En un motor sincrónico o síncrono, el rotor es
alimentado por una corriente de tipo DC para formar el campo magnetico,
necesita de colectores y escobillas lo que incide en su costo y mantenimiento,
pero tienen tamaño reducidos y facilidad de graduar sus velocidades. Analizamos
ahora lo que pasa en un arranque típico de un motor sincrónico, cuando el campo
magnético del estator gira en sentido anti horario. Analizaremos las posiciones
a 0º, 90º, 180º, 270º y 360º en el tiempo.
|
TIEMPO 1 |
TIEMPO 2 |
|
|
|
|
TIEMPO 3 |
TIEMPO 4 |
|
|
|
Como el proceso pasa muy rápido el rotor no alcanza a
rotar, por otro lado en cierto momento del proceso, el par se invierte lo cual
también impide el movimiento. Una de las formas de poder arrancar estos motores
es con el uso de devanados amortiguadores.
1.6.2.1.
ARRANQUE DE MOTORES SINCRONICOS EMPLEANDO DEVANADOS DE AMORTIGUACION
Son barras puestas dentro de unas ranuras talladas en
el rotor y luego cortocircuitadas en cada extremo. Para entender el
funcionamiento se ha hecho la siguiente secuencia de diagramas.
En el tiempo 0, se asuma que el campo magnético del
estator Bs gira en sentido anti horario. En esta posición, el campo magnético
giratorio del estator, crea o induce un voltaje en las varillas del devanado de
amortiguamiento. Para las varillas de la parte superior, su velocidad con
respecto a la del campo Bs es hacia la derecha, por esta razón, la dirección
del voltaje inducido es saliendo de la pagina, mientras que en la barras de
bajo, es entrando a la pagina porque su velocidad relativa con respecto al campo
del estator es hacia la izquierda.
Estos voltajes inducidos producen circulación de
corriente, saliendo de las barras de la parte superior y entrando en las barras
de la parte inferior, lo cual induce un campo magnético que esta a 90º del
campo magnético del estator.
|
|
Como el campo magnético del rotor esta alineado con el
campo magnético del estator, su par es cero, mientras que el campo magnético
producido por el devanado amortiguado si crea un par o torque en sentido anti
horario que hace que el rotor gire.
Par inducido por devanado amortiguación = K * ( BDA x BE )
En el tiempo 1 ahora el campo magnético del estator
esta a 180º o en posición horizontal tal como se observa en la figura
|
|
En este caso la velocidad relativa del devanado de
amortiguación que es hacia la derecha, esta en paralelo con el campo magnético
del estator, por tanto el voltaje inducido en el devanado de amortiguación es
cero y su campo magnético también es cero.
Pero entonces, el campo magnético del devanado del
rotor esta a 90º del campo magnético del estator produciendo un par o torque
anti horario.
Par inducido por devanado rotor = K * ( BR x BE )
En el tiempo 3, ahora el campo magnético del estator
esta en dirección hacia abajo, el campo magnético del estator BE
esta nuevamente alineado con el campo magnético del rotor BR, por
tanto el torque de ambos es cero. Pero ahora el campo magnético del estator
esta perpendicular a las velocidades relativas del devanado de amortiguación,
produciendo en las barras de la parte superior un volteje inducido que ahora
entra a la pagina, mientras en las barras inferiores el voltaje inducido sale
de la pagina.
Estos voltajes inducidos producen circulación de
corriente, saliendo de las barras de la parte inferior y entrando en las barras
de la parte superior, lo cual induce un campo magnético que esta a 90º del
campo magnético del estator. Esto genera nuevamente un par o torque en sentido
anti horario:
Par inducido por devanado amortiguación = K * ( BDA x BE )
|
|
En el tiempo 4, el campo magnético del estator esta en
posición horizontal, como esta alineado con las velocidades relativas de las
barras con respecto al campo magnético del estator, el par producido se vuelve
nuevamente cero.
Par inducido por devanado amortiguación = K * ( BDA x BE ) = 0
El campo magnético del rotor es el que ahora produce
un par o torque en sentido anti horario cuyo valor es:
Par inducido por devanado rotor = K * ( BR x BE )
|
|
1.7.
RELACION DE LA FRECUENCIA ELECTRICA CON LA VELOCIDAD DEL ROTOR
En el siguiente estator se tiene dos polos, uno norte
y uno sur, para realizar un campo magnético giratorio, cada polo tiene que
rotar los 360º geométricos en otras palabras, una vuelta completa.
|
Por cada ciclo de la corriente aplicada cada polo da
una vuelta completa alrededor se la superficie del estator. Por consiguiente,
la velocidad de rotación del campo en revoluciones por segundo es igual a la
frecuencia eléctrica en Hertz. Frecuencia eléctrica = Frecuencia rotación Velocidad angular eléctrica = Velocidad angular
mecánica |
|
|
Cuando se tienen 4 polos, dos norte y dos sur, por
cada frecuencia eléctrica, cada polo recorre media vuelta, tal como se
observa en la figura. Como un ciclo eléctrico tiene 360º grados eléctricos y
el polo se ha movido 180º grados eléctricos, en esta estator, la relación
entre el ángulo eléctrico y el ángulo mecánico es: qELECTRICO = 2 * q MECANICO Por tanto Frecuencia eléctrica = 2 */ Frecuencia mecánica Velocidad angular eléctrica = 2 * Velocidad angular
mecánica Establezcamos ahora unas formulas generales con base
en el numero de polos de una maquina. A medida que se incrementa el número de
polos, se disminuye la velocidad angular del estator. |
|
Por tanto se deduce que:
Frecuencia eléctrica = Frecuencia mecánica * ( Número
polos / 2 )
FE = ( P/2 ) * FM
Se sabe que FE = ( N rpm / 60 )
FE = N rpm * ( P/120 )
Entonces para una maquina de 2 polos a una frecuencia
de 60 Hz sus revoluciones son:
N rpm = ( FE
* 120 ) / P = ( 60 Hz * 120 ) / 2 = 3600 RPM
1.8.
TORQUE PRODUCIDO POR UNA MAQUINA DE CA
En un motor de CA hay dos campos magnéticos
interactuando entre sí: uno producido por el estator ( BE ) y el
otro producido por el rotor ( BR ) . Dicha interacción produce un
torque o par interno en la máquina. La dirección de giro de este torque obedece
la regla de la mano derecha.
|
Par inducido = k ( BR x BE
) El valor del par inducido esta dado por la
expresión: Par inducido = k *( BR * BE )
* Sen g |
Donde: K : Constante BR : Vector densidad de
flujo del rotor. BE : Vector densidad de
flujo del estator. g : Angulo comprendido entre BR
y BE |
Lo anterior indica que si los campos magnéticos del
rotor y el estator están alineados, no habrá par o torque y por tanto no se
moverá. La dirección de giro del torque estará determinado por la regla de la
mano derecha cuando el vector del rotor BR alcance al vector del
estator BE .

No hay comentarios:
Publicar un comentario
Nota: solo los miembros de este blog pueden publicar comentarios.